Jiadai Sun 孙家岱

I obtained my Master’s degree in April 2023 from Northwestern Polytechnical University (NWPU), with the supervision of Prof. Yuchao Dai, once again with the honor of Outstanding Graduate. And I received my Bachelor’s degree in July 2020 from the School of Computer Science of NWPU, with the honor of Outstanding Graduate.
Currently, I am a Perception Algorithm Engineer at Intelligent Driving Group (IDG) of Baidu Inc. I spent about a year of pleasant and fulfilling internship at the Robotics and Autonomous Driving Lab of Baidu Research, and working on a research topic about Scene Reconstruction and Novel View Synthesis. Before that, I have been working very closely with Xieyuanli Chen on a research topic about LiDAR-Based Moving Object Segmentation at Haomo.AI. I used to be a Research Intern on topics related to 3D Scene Reconstruction and Understanding at 3D&AR Group @ MIG of SenseTime Research supervised by Jiaming Sun and Prof. Xiaowei Zhou (CAD&CG, ZJU) from October 2019 to May 2020.
During my undergraduate study, I worked in CVR-Lab supervised by Prof. Yuchao Dai as a Research Assistant on LiDAR/Visual 3D Registration and Reconstruction, Dual LiDAR calibration, etc. I’ve served in the NWPU Dancing Robot Research And Training Base - Rescue Robot Group Team - Explorer for two years as a Robot Software Engineer and Team Leader since July, 2017. As usual, we participate in RoboCup Rescue Robot League Regional Open Competitions, and my main contribution is about SLAM, Robot Localization and Navigation, Path Planning, etc.
Github: MaxChanger | Google Scholar | Email: sunjiadai AT foxmail dot com, sunjiadai AT mail.nwpu.edu.cn
- If you are looking for an internship or think we have opportunities to collaborate, free to contact me.Research Interest
3D Vision, Robotics, SLAM, Autonomous Driving, Point Cloud Understanding, Motion Understanding
Recent News
- [Feb 21, 2026] One paper accepted to CVPR 2026 🍻🎉
- [Nov 08, 2025] One paper accepted to AAAI 2026 🎉
- [Jul 17, 2024] One paper accepted to TITS 🍻
- [Jul 26, 2023] One paper accepted to ACM MM 2023 Oral 🎉
- [Jul 18, 2023] One paper accepted to ICCV 2023 Oral 🍻🎉
- [Jun 22, 2023] One paper MapNeRF accepted to IROS 2023 👏
- [Feb 05, 2023] MUNet accepted to Pattern Recognition (PR) 🍻🎉
- [Dec 21, 2022] One paper MFF-Net accepted to RA-L 🍻
- [Sep 17, 2022] One paper (NDVG) accepted to ACCV 2022 Oral 🎉
- [Aug 11, 2022] One paper (CU-Net) accepted to RA-L 🍻
- [Aug 01, 2022] One paper accepted to TCSVT 👏
- [Jun 30, 2022] MotionSeg3D accepted to IROS 2022 🍻🎉
- [May 07, 2022] One paper accepted to Pattern Recognition (PR) 👏
- [Apr 30, 2022] One paper accepted to SPL
- [Apr 27, 2022] Start a new internship at RA-Lab @ Baidu Research 🎉😎 ...
- [Jan 10, 2022] One paper accepted to TCSVT 👏
- [Dec 01, 2021] One paper accepted to AAAI 2022 👏
- [Nov 29, 2021] One paper accepted to GRSL
- [Nov 26, 2021] Start a internship at Perception Group @ HAOMO.AI 😎
- [May 11, 2020] One survey paper accepted to VR&IH
- [Oct 14, 2019] Start a internship at MIG-3D&AR Group @ SenseTime Research 😎
Experience & Education

Intelligent Driving Group (IDG) @ Baidu, Beijing, 04/2023 - now
– Autonomous Driving Perception Algorithm Engineer
– Apollo L2+ Self-Driving (ASD/ANP3) & Apollo L4 Robotaxi

Robotics and Autonomous Driving Lab (RAL) @ Baidu Research, Beijing, 04/2022 - 04/2023, Intern
– Scene Reconstruction and Novel View Synthesis
– Mentor: Chenming Wu, Xibin Song, Dingfu Zhou and Liangjun Zhang

Perception Algo. @ Intelligent Algo. Dept. of HAOMO.AI, Beijing, 11/2021 - 04/2022, Intern
– Online LiDAR-based 3D Moving Object Segmentation
– Mentor: Xieyuanli Chen and Xianjing Zhang

3D&AR Group @ MIG of SenseTime Research, Hangzhou, 10/2019 - 05/2020, Intern
– 3D Scene Reconstruction and Understanding | RGB-D Indoor Scene and Object Reconstruction
– Mentor: Jiaming Sun and Prof. Xiaowei Zhou

School of Electronics and Information @ Northwestern Polytechnical University, China, 09/2020 - 04/2023
– Master of Engineering, Outstanding Graduate | Advisor: Prof. Yuchao Dai
– Thesis: Dynamic Scene Perception and Semantic Segmentation Based on Deep Learning
School of Computer Science @ Northwestern Polytechnical University, China, 09/2016 - 06/2020
– Bachelor of Engineering, Outstanding Graduate, Computer Science and Technology | Advisor: Prof. Yuchao Dai
– Research on 3D Point cloud Registration and Dense 3D reconstruction
Selected Publications
This part will be updated as soon as my on-going projects are approved to be made public which should be quite exciting.
- SPE-MVS: Spatial Position Encoding Enhanced Multi-View Stereo with Monocular Depth Priors
Shaoqian Wang, Jiadai Sun, Bosen Hou, Qiang Wang, Bin Fan, Bo Li, Bin Lu, Yuchao Dai
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2026
[Page] [Paper] [Code]
- EC-MVSNet: Enhanced Cascaded Multi-View Stereo with Cross-Scale Relevance Integration
Shaoqian Wang, Jiadai Sun, Bin Fan, Qiang Wang, Bin Lu, Yuchao Dai
Proceedings of the AAAI Conference on Artificial Intelligence (AAAI) 2026
[Page] [Paper] [Code]
- Joint Scene Flow Estimation and Moving Object Segmentation on Rotational LiDAR Data
Xieyuanli Chen, Jiafeng Cui, Yufei Liu, Xianjing Zhang, Jiadai Sun, Rui Ai, Weihao Gu, Jintao Xu, Huimin Lu
IEEE Transactions on Intelligent Transportation Systems (TITS) 2024
[Paper] [arXiv] [Code]
- Digging into Depth Priors for Outdoor Neural Radiance Fields
Chen Wang, Jiadai Sun, Lina Liu, Chenming Wu, Zhelun Shen, Dayan Wu, Yuchao Dai, Liangjun Zhang
Proceedings of the ACM International Conference on Multimedia (ACM MM) [Oral] 2023
[Page] [Paper] [arXiv] [Code] [Data]
- Forward Flow for Novel View Synthesis of Dynamic Scenes
Xiang Guo, Jiadai Sun, Yuchao Dai, Guanying Chen, Xiaoqing Ye, Xiao Tan, Errui Ding, Yumeng Zhang, Jingdong Wang
Proceedings of the International Conference on Computer Vision (ICCV) [Oral] 2023
[Page] [Paper] [arXiv]
- MapNeRF: Incorporating Map Priors into Neural Radiance Fields for Driving View Simulation
Chenming Wu, Jiadai Sun, Zhelun Shen, Liangjun Zhang
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023
[arXiv] [Video]
- Efficient Spatial-Temporal Information Fusion for LiDAR-based 3D Moving Object Segmentation
Jiadai Sun, Yuchao Dai, Xianjing Zhang, Jintao Xu, Rui Ai, Weihao Gu, Xieyuanli Chen
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022
[Page] [Paper] [arXiv] [Code] [Data]
- MUNet: Motion Uncertainty-aware Semi-supervised Video Object Segmentation
Jiadai Sun*, Yuxin Mao*, Yuchao Dai, Yiran Zhong, Jianyuan Wang (* equal contribution)
Pattern Recognition (PR) 2023
[Page] [Paper] [arXiv]
- MFF-Net: Towards Efficient Monocular Depth Completion With Multi-Modal Feature Fusion
Lina Liu, Xibin Song, Jiadai Sun, Xiaoyang Lyu, Lin Li, Yong Liu, Liangjun Zhang
IEEE Robotics and Automation Letters (RA-L) 2023
[Paper]
- Neural Deformable Voxel Grid for Fast Optimization of Dynamic View Synthesis
Xiang Guo, Guanying Chen, Yuchao Dai, Xiaoqing Ye, Jiadai Sun, Xiao Tan, Errui Ding
Proceedings of the Asian Conference on Computer Vision (ACCV) [Oral] 2022
[Page] [arXiv] [Code]
- CU-Net: LiDAR Depth-only Completion with Coupled U-Net
Yufei Wang, Yuchao Dai, Qi Liu, Peng Yang, Jiadai Sun, Bo Li
IEEE Robotics and Automation Letters (RA-L) 2022
[Page] [Paper] [arXiv] [Code]
- End-to-end Learning the Partial Permutation Matrix for Robust 3D Point Cloud Registration
Zhiyuan Zhang, Jiadai Sun, Yuchao Dai, Dingfu Zhou, Xibin Song, Mingyi He
Proceedings of the AAAI Conference on Artificial Intelligence (AAAI) 2022
[Page] [Paper] [arXiv] [Code]
- Self-supervised Rigid Transformation Equivariance for Accurate 3D Point Cloud Registration
Zhiyuan Zhang, Jiadai Sun, Yuchao Dai, Dingfu Zhou, Xibin Song, Mingyi He
Pattern Recognition (PR) 2022
[Page] [Paper] [Code]
- VRNet: Learning the Rectified Virtual Corresponding Points for 3D Point Cloud Registration
Zhiyuan Zhang, Jiadai Sun, Yuchao Dai, Bin Fan, Mingyi He
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT) 2022
[Page] [Paper] [arXiv] [Code]
- Learning a Task-specific Descriptor for Robust Matching of 3D Point Clouds
Zhiyuan Zhang, Yuchao Dai, Bin Fan, Jiadai Sun, Mingyi He
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT) 2022
[Page] [Paper] [arXiv] [Code]
- Searching Dense Point Correspondences via Permutation Matrix Learning
Zhiyuan Zhang, Jiadai Sun, Yuchao Dai, Bin Fan, Qi Liu
IEEE Signal Processing Letters (SPL) 2022
[Paper] [arXiv]
- A Representation Separation Perspective to Correspondences-free Unsupervised 3D Point Cloud Registration
Zhiyuan Zhang, Jiadai Sun, Yuchao Dai, Dingfu Zhou, Xibin Song, Mingyi He
IEEE Geoscience and Remote Sensing Letters (GRSL) 2021
[Paper] [arXiv]
- Deep learning based point cloud registration: an overview
Zhiyuan Zhang, Yuchao Dai, Jiadai Sun
Virtual Reality & Intelligent Hardware 2020
[Paper]
Projects
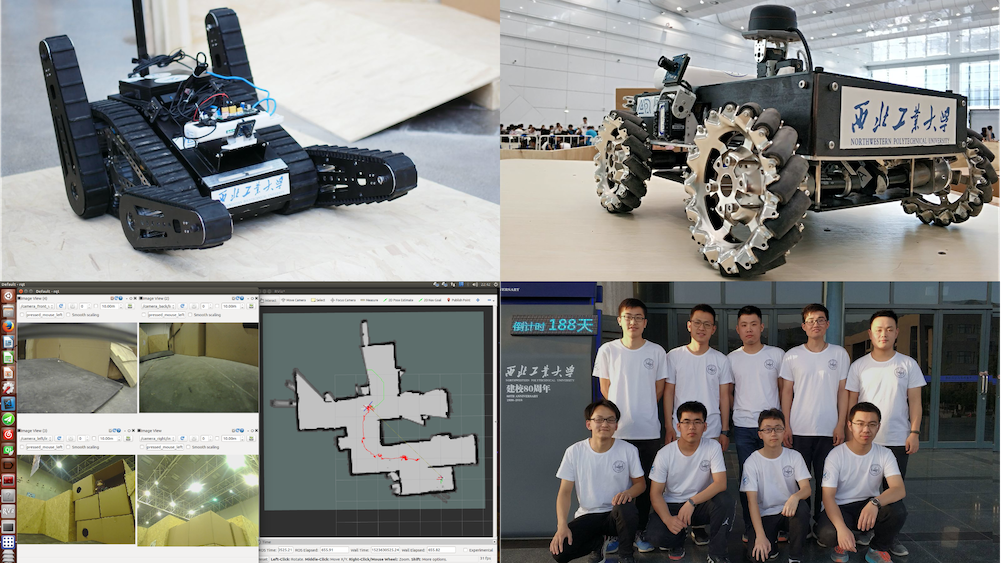
Rescue Team Leader - NPU Dancing Robot Research & Training Base 07/2017 - 08/2019
Goal: Search for several victims placed in the disaster scene simulation site, find and mark them.
My main responsibility is SLAM and auto-navigation, based on Cartographer and Hector SLAM algorithms, combining them with our robots. Thanks to the cooperation of teammates.
Video: [Rescue Team Explorer – Presentation][Autonomous Obstacle Avoidance Control Algo.]
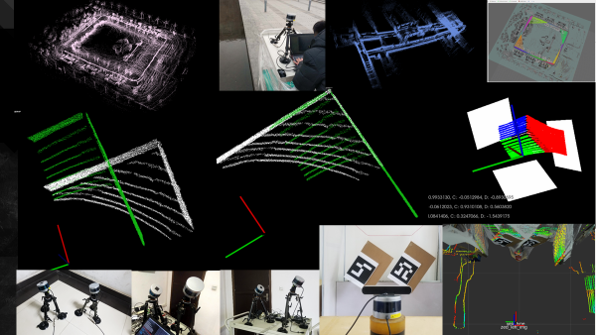
Major Member - NPU Peak Experience Program with Prof. Y. Dai 10/2018 - 06/2020
Topic: LiDAR/Visual 3D Reconstruction, Deep ICP, Multi-sensor calibration, Visual SLAM etc. Data acquisition and reconstruction of buildings using 3D LiDAR with Cartographer. Calibration of the extrinsic parameters between Camera and LiDAR has been achieved.
Video: [Velodyne-16+IMU+cartographer][Dual LiDAR Calibration]
Honors & Awards
- Outstanding Graduate and Excellent Graduation Projects | Northwestern Polytechnical University, 04/2023
- Outstanding Graduate and Excellent Graduation Projects | Northwestern Polytechnical University, 06/2020
- International First Prize | Meritorious Winner, International University Interdisciplinary Contest in Modeling (ICM), 02/2018
- Silver Award | RoboCup Rescue Robotic Tournament - Divisional Competition, Zhejian, 04/2018
- Champion | RoboCup Rescue, Divisional Competition-Independent Ability Challenge, Zhejiang, 04/2018
- Champion | China Robot Competition - Environmental Autonomous Exploration Project, Sichuan, 08/2018
- First Prize | Zhonghangzhi Technology Co., Ltd. “Lianfei Cup” Challenge Result Presentation, 11/2018
- First Prize | National Undergraduate Mathematical Modeling Competition (Shaanxi Province), 09/2017
- Second Prize | The 11th National University Student Technology Contest on Energy-saving, Wuhan, 08/2018
- Silver Award | “Internet +” College Student Innovation and Entrepreneurship Competition, Shaanxi, 10/2018
Misc.
- Reviewer: CVPR / ECCV / AAAI / IROS / RA-L / ACCV / ACM-MM / ROB / TCSVT / SIVP / T-ITS / TVCG etc.
- I love traveling and photography, and the scenery in northwestern China is usually exciting. (18/34 provinces) [500px]
- In the past I used to use Hexo and Markdown to make some records. It is written in Chinese. Click ⇒BLOG-LINK